
|
|||||||||||||||||||||
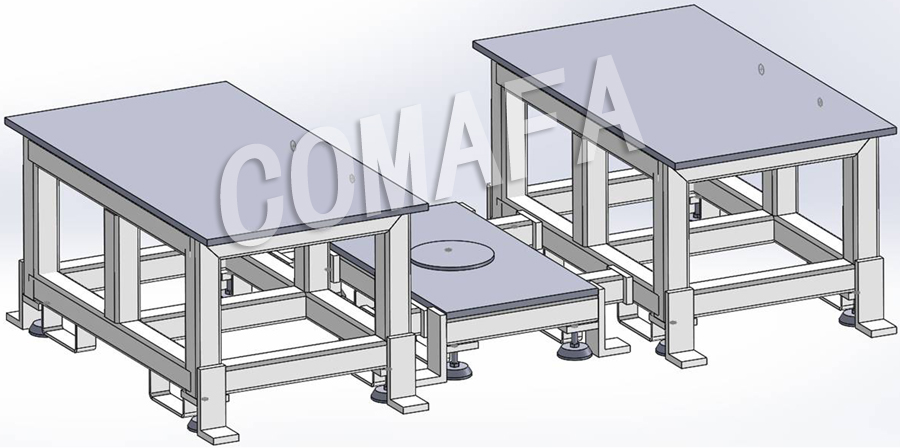
超聲波機器人焊接工作站由機器人系統(tǒng)、超聲波焊接系統(tǒng)、機器人安裝底座、焊接夾具安裝平臺、焊接夾具、全封閉式安全圍欄、控制柜及焊接電源放置架以及電氣控制系統(tǒng)組成。結(jié)構(gòu)圖如下:
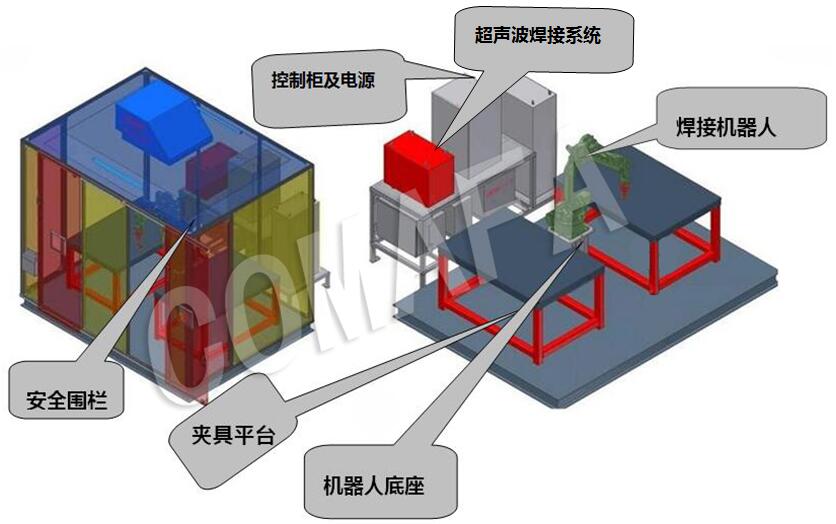
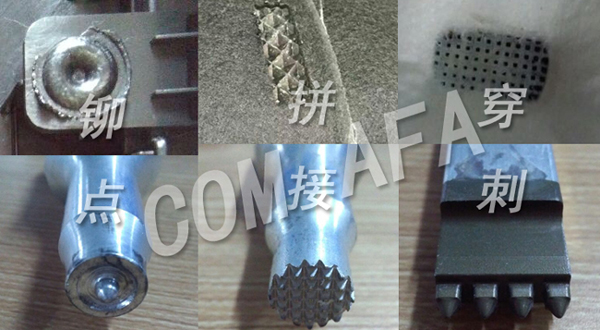
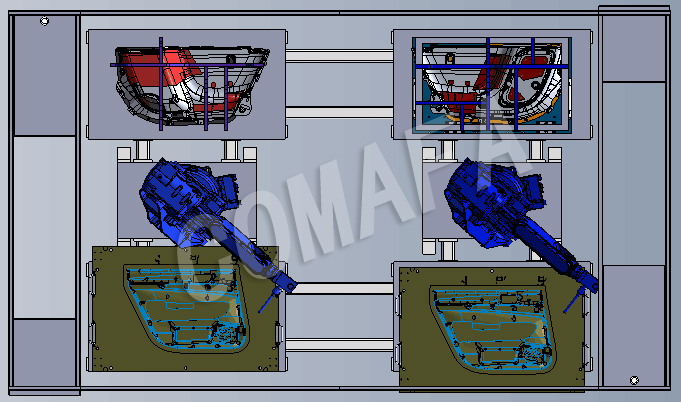
超聲波機器人焊接工作站主要用于完成對汽車塑料件[塑料件拼接、塑料柱鉚點、隔音棉穿刺等(見下圖)]的自動焊接,固定坐式機器人工位及焊接,H型雙工位平行布局方式;其中焊接工位分別由一套夾具固定平臺和焊接工裝夾具組成(下圖)。即超聲波機器人焊接工作站采用壹套固定座式焊接機器人+兩套焊接夾具平臺(可按要求分布)+兩套焊接夾具的組合方式。

當機器人作為多工位焊接時,兩個工位能進行預(yù)約焊接,一個工位焊接的同時另一工位進行工件的裝卸,有效提高機器人使用率和生產(chǎn)效率。為方便進行多種規(guī)格工件焊接及參數(shù)設(shè)置,控制系統(tǒng)采用PLC+觸摸屏方式進行控制和操作。
設(shè)備布局方式:H型雙工位平行工位布局;兩套焊接夾具平臺對稱布置,坐式機器人安裝在兩套焊接工裝的中間,工作站設(shè)置全封閉式安全圍欄。
設(shè)備可按需求帶2套超聲波焊接系統(tǒng),焊接不同形狀的塑料件。
控制系統(tǒng):采用三菱PLC+工業(yè)觸摸屏主控方式,系統(tǒng)的啟動、停止以及暫停、急件等均可通過操作盤進行;系統(tǒng)的運行狀態(tài)及系統(tǒng)報警可在操作盤上顯示。
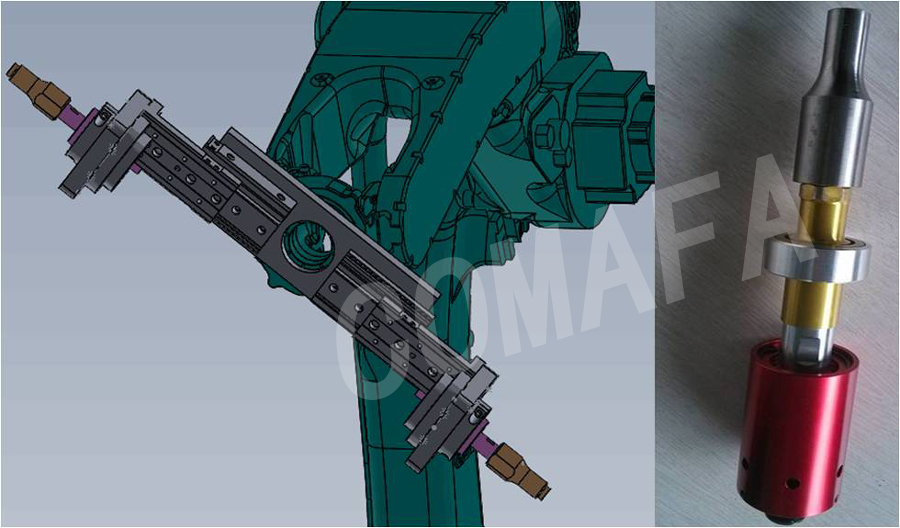
焊接工裝夾具及平臺
工裝夾具采用手動+氣動快速夾緊,由夾具安裝定位板、定位塊、定位銷、快速夾緊機構(gòu)、快換連接接口等機構(gòu)組成,主要完成汽車塑料件的快速定位焊接時的夾緊。采用手動快速定位及夾緊,保證工件定位準確、牢靠。根據(jù)同類型工件,可手動快速調(diào)整個組件,以適應(yīng)長短不同的工件的定位及壓緊;根據(jù)不同類型工件(產(chǎn)品換型),采用整體更換夾具的方式實現(xiàn),每一付夾具上均設(shè)置有可以快速換模的裝置(獨立氣源以及快插電源),能保證安全、準確、快速地實現(xiàn)夾具更換,以實現(xiàn)產(chǎn)品換型,提高工作站的柔性。
適用產(chǎn)品:
適用汽車塑料件的焊接(門板鉚點、門板隔音棉、輪罩總成、喇叭罩、行李箱蓋板、后隔板、引擎蓋、車門加強柱、a柱、座椅網(wǎng)兜、備胎蓋板、汽車保險杠沖孔等等),單點焊接因此適用大部分汽車內(nèi)飾外飾件。
焊接節(jié)拍
單點(2-4s)+機器人運動軌跡(2s)。

